Al Instituto de Diseño y Fabricación se le ha concedido el Proyecto VISIÓN ARTIFICIAL Y ROBÓTICA COLABORATIVA EN PULIDO DE SUPERFICIES EN LA INDUSTRIA (ROCOPUL) dentro del Programa Estatal de Investigación, Desarrollo e Innovación Orientada a los Retos de la Sociedad, en el Marco del Plan Estatal de Investigación Científico-técnica y de Innovación. Este proyecto s concede para las anualidades 2018, 2019 y 2020.
El objetivo de este proyecto es abordar la reparación robotizada de defectos superficiales de pintura dentro del proceso de control de calidad asociado a la industria del automóvil. Para ello, se plantea la utilización de robots colaborativos dado que la robotización no podrá ser total a corto paso y requerirá de una etapa, quizá larga, de transición en la que el robot convivirá con el operario.
El control de calidad de productos manufacturados es uno de los procesos más importantes dentro de las líneas de producción industriales. Contiene dos fases: la detección y localización de anomalías que no cumplen con los estándares de calidad de las compañías; y el tratamiento y reparación de las mismas. Este proceso sigue siendo uno de los menos automatizados debido a su gran complejidad.
Una de las industrias más involucradas en la mejora del control de calidad de sus productos es la automoción. En este contexto, el control de calidad de superficies es uno de los más exigentes y relevantes, el cual va desde el textil (asientos, techo, volantes, etc.) hasta la propia carrocería del vehículo. En la actualidad existen soluciones automáticas industriales para la detección de defectos en superficies. Sin embargo, su reparación o pulido sigue siendo un proceso realizado manualmente.
Existen investigaciones y propuestas de sistemas automáticos para la reparación de los defectos superficiales, aunque presentan diversos inconvenientes: los robots han de confinarse; solamente se realiza reparación en superficies planas; la reparación obliga a que la superficie esté quieta; los actuales controles de reparación mediante lijado y pulido no aseguran robustez y fiabilidad aplicados en superficies no planas.
Por tanto, el presente proyecto pretende dar solución al problema de tratamiento superficial con defectos mediante el uso de robots colaborativos, técnicas de control no convencional, visión y aprendizaje basadas en inteligencia artificial.
Por una parte, la amplia experiencia del equipo de investigación solicitante en detección de defectos en superficies de automóvil (textiles y metal), ayudará a desarrollar nuevos algoritmos de detección y localización 6D precisa de defectos para su posterior tratamiento por parte de un sistema colaborativo robot-humano.
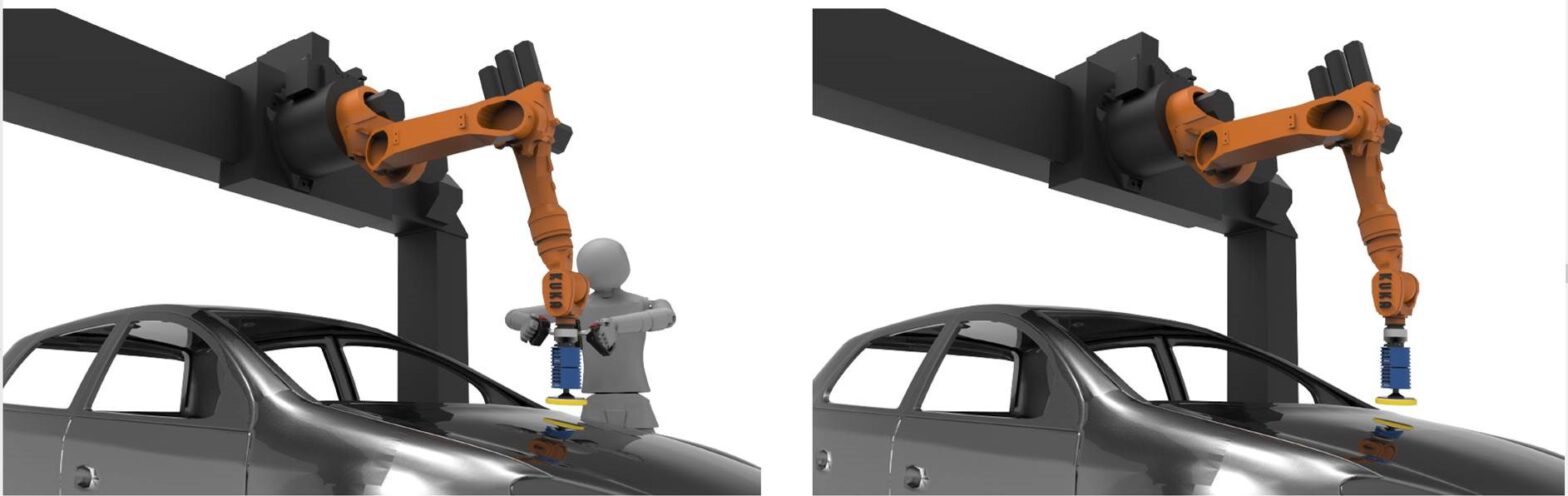
La novedosa propuesta en este proyecto consiste en realizar la colaboración robot-humano en dos vertientes: 1) el robot aprenda del humano experto las acciones que éste realiza a la hora de reparar un defecto en base a su experiencia previa, y por otro que el humano sea asistido por el robot mientras se realiza la tarea (con sistemas hápticos y realidad aumentada), optimizando así la reparación del defecto; 2) aprovechando la tendencia industrial de incorporar robots que puedan trabajar en el mismo espacio que los humanos para así poder dar un paso de cara a obtener una solución totalmente automática. Para alcanzar estos objetivos, se diseñará una herramienta colaborativa de pulido que cumpla con la normativa vigente de seguridad.

